这里用的是野火霸道的板子,搭载了STM32F103ZET6. 目前所学知识尚且较少,这里的笔记仅仅记录一下学习过程中的代码,方便以后回头复习以及复制。目前来说,似乎大部分代码都非常易懂,故注释较少。参考资料——《零死角玩转 STM32F103—霸道_V2 开发板》,参考视频——150集-野火F103霸道/指南者视频教程
部分原理图展示
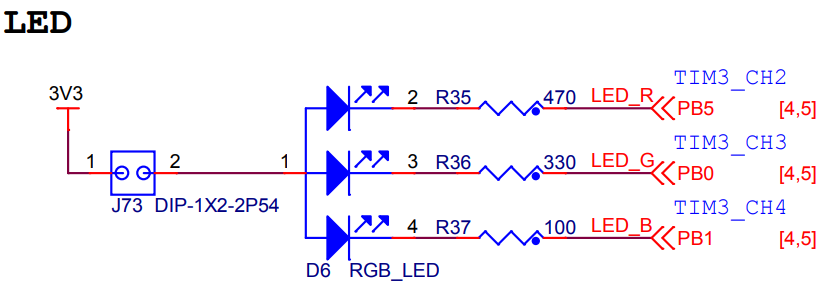
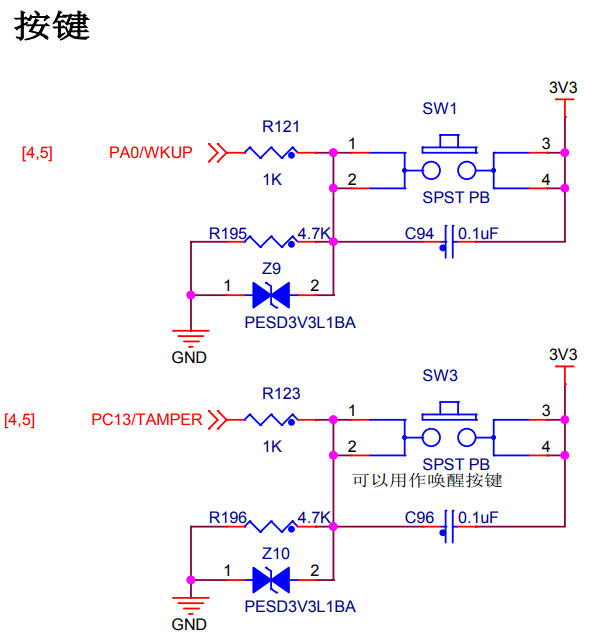
按键监控点亮LED灯
利用GPIO监控按键电位,从而控制LED灯亮灭。GPIO模式区别
其他函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
| void Delay(__IO uint32_t nCount){
for(; nCount != 0; nCount--);
}
uint8_t waitkey(GPIO_TypeDef* GPIOx, uint16_t GPIO_PIN){
if (GPIO_ReadInputDataBit(GPIOx, GPIO_PIN) == 1){
while(GPIO_ReadInputDataBit(GPIOx, GPIO_PIN) == 1);
return 1;
}else{
return 0;
}
}
void LED_TURN_ON(char i){
GPIO_SetBits(GPIOB, GPIO_Pin_All);
if (i % 3 == 0){
GPIO_ResetBits(GPIOB, GPIO_Pin_5);
}else if(i % 3 == 1){
GPIO_ResetBits(GPIOB, GPIO_Pin_0);
}else if(i % 3 == 2){
GPIO_ResetBits(GPIOB, GPIO_Pin_1);
}
}
|
主函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
| int main(void){
uint16_t COUNT = 0;
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13;
GPIO_Init(GPIOC, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_SetBits(GPIOB, GPIO_Pin_All);
while (1){
if (waitkey(GPIOA, GPIO_Pin_0) == 1){
GPIO_SetBits(GPIOB, GPIO_Pin_All);
}
if (waitkey(GPIOC, GPIO_Pin_13) == 1){
LED_TURN_ON(COUNT++);
}
}
}
|
中断
中断函数的名称可以在启动文件内接近尾端部分查到。关于Interrupt Numbers,External Line 04的写法基本一致:EXTI0_IRQnEXTI4_IRQn,但Line 59和Line 1015写为EXTI9_5_IRQn和EXTI15_10_IRQn.
宏部分
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
| #define KEY1_GPIO_CLK RCC_APB2Periph_GPIOA
#define KEY1_GPIO_PORT GPIOA
#define KEY1_GPIO_PIN GPIO_Pin_0
#define KEY1_EXTI_PORTSRC GPIO_PortSourceGPIOA
#define KEY1_EXTI_PINSRC GPIO_PinSource0
#define KEY1_EXTI_LINE EXTI_Line0
#define KEY1_EXTI_IRQ EXTI0_IRQn
#define KEY1_IRQHandler EXTI0_IRQHandler
#define KEY2_GPIO_CLK RCC_APB2Periph_GPIOC
#define KEY2_GPIO_PIN GPIO_Pin_13
#define KEY2_GPIO_PORT GPIOC
#define KEY2_EXTI_PORTSRC GPIO_PortSourceGPIOC
#define KEY2_EXTI_PINSRC GPIO_PinSource13
#define KEY2_EXTI_LINE EXTI_Line13
#define KEY2_EXTI_IRQ EXTI15_10_IRQn
#define KEY2_IRQHandler EXTI15_10_IRQHandler
#define LED_GPIO_CLK RCC_APB2Periph_GPIOB
#define LED_GPIO_PORT GPIOB
#define LED_R_GPIO_PIN GPIO_Pin_5
#define LED_G_GPIO_PIN GPIO_Pin_0
#define LED_B_GPIO_PIN GPIO_Pin_1
|
核心函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
| static void EXTI_NVIC_Config(void){
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStruct.NVIC_IRQChannel = KEY1_EXTI_IRQ;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel = KEY2_EXTI_IRQ;
NVIC_Init(&NVIC_InitStruct);
}
void EXTI_Key_Config(void){
GPIO_InitTypeDef GPIO_InitStruct;
EXTI_InitTypeDef EXTI_InitStruct;
RCC_APB2PeriphClockCmd(KEY1_GPIO_CLK, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
EXTI_NVIC_Config();
GPIO_InitStruct.GPIO_Pin = KEY1_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(KEY1_GPIO_PORT, &GPIO_InitStruct);
GPIO_EXTILineConfig(KEY1_EXTI_PORTSRC, KEY1_EXTI_PINSRC);
EXTI_InitStruct.EXTI_Line = KEY1_EXTI_LINE;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStruct);
GPIO_InitStruct.GPIO_Pin = KEY2_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(KEY2_GPIO_PORT, &GPIO_InitStruct);
GPIO_EXTILineConfig(KEY2_EXTI_PORTSRC, KEY2_EXTI_PINSRC);
EXTI_InitStruct.EXTI_Line = KEY2_EXTI_LINE;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStruct);
}
void KEY1_IRQHandler(void){
if (EXTI_GetITStatus(KEY1_EXTI_LINE) != RESET) {
count--;
LED_TURN_ON(count);
EXTI_ClearITPendingBit(KEY1_EXTI_LINE);
}
}
void KEY2_IRQHandler(void){
if (EXTI_GetITStatus(KEY2_EXTI_LINE) != RESET) {
count++;
LED_TURN_ON(count);
EXTI_ClearITPendingBit(KEY2_EXTI_LINE);
}
}
void LED_init(void){
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(LED_GPIO_CLK, ENABLE);
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin = LED_R_GPIO_PIN;
GPIO_Init(LED_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = LED_G_GPIO_PIN;
GPIO_Init(LED_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = LED_B_GPIO_PIN;
GPIO_Init(LED_GPIO_PORT, &GPIO_InitStruct);
GPIO_SetBits(LED_GPIO_PORT, GPIO_Pin_All);
}
void LED_TURN_ON(char i);
|
主函数
1
2
3
4
5
6
| char count = 0;
int main(void){
LED_init();
EXTI_Key_Config();
while(1){}
}
|
SysTick
24bit递减计数器,每计数一次用时为1/SYSCLK,一般SYSCLK等于72M。SysTick属于内核外设,有关的寄存器定义和库函数都在内核相关的库文件core_cm3.h中。SysTick属于内核外设,跟普通外设的中断优先级有区别,没有抢占优先级和子优先级的说法,其优先级只需要配置一个寄存器即可,取值范围为0000b~1111b。但是中断优先级分组依旧对其起作用,即配置优先级方式不同,但优先级划分方式还是跟分组的一致。
下面这一段代码在我的机器上似乎有点问题,一执行就会卡死。试过在while循环下面添加点亮LED,但是始终没有成功点亮,说明没有跳出循环,这貌似是CRTL寄存器位16始终没有置1。尝试扩展第6行,在while循环体中输出SysTick->VAL,但是只会输出两次VAL的值,然而并未跳出Delay_us执行后面的内容。
1
2
3
4
5
6
7
8
9
10
| void Delay_us( __IO uint32_t us){
uint32_t i;
SysTick_Config(SystemCoreClock/1000000);
for (i=0; i<us; i++) {
while ( !((SysTick->CTRL)&(1<<16)) );
}
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
|
另一种方式,这种无问题。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| static __IO u32 TimingDelay;
void Delay_ms(__IO u32 nTime){
SysTick_Config(SystemCoreClock / 1000);
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
TimingDelay = nTime;
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;
while(TimingDelay != 0);
}
void SysTick_Handler(void){
if (TimingDelay != 0)
TimingDelay--;
else
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
|
还有一种方式,在B站视频底下看到的,还未测试。
1
2
3
4
5
6
7
8
9
10
11
| void delay_us(uint32_t nus){
uint32_t temp;
SysTick->LOAD=9*nus;
SysTick->VAL=0x00;
SysTick->CTRL=0x01;
do{
temp=SysTick->CTRL;
}while((temp&0x01)&&(!(temp&(1<<16))));
SysTick->CTRL=0x00;
SysTick->VAL=0x00;
}
|
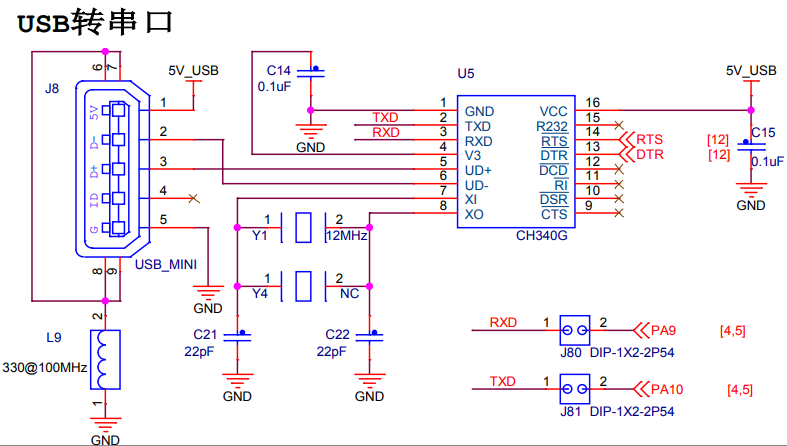
USART收发数据 (中断式)
同步异步收发器 (Universal Synchronous Asynchronous Receiver and Transmitter, USART)
USB转串口部分原理图
宏部分
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| #define USARTx USART1
#define USART_CLK RCC_APB2Periph_USART1
#define USART_CLK_Cmd RCC_APB2PeriphClockCmd
#define USART_BAUDRATE 115200
#define USART_GPIO_CLK RCC_APB2Periph_GPIOA
#define USART_GPIO_CLK_Cmd RCC_APB2PeriphClockCmd
#define USART_TX_GPIOx GPIOA
#define USART_TX_GPIO_PIN GPIO_Pin_9
#define USART_RX_GPIOx GPIOA
#define USART_RX_GPIO_PIN GPIO_Pin_10
#define USART_IRQ USART1_IRQn
#define USART_IRQHandler USART1_IRQHandler
|
核心函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
| static void NVIC_Config(void){
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStruct.NVIC_IRQChannel = USART_IRQ;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
}
void USART_Config(void){
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
USART_GPIO_CLK_Cmd(USART_GPIO_CLK, ENABLE);
USART_CLK_Cmd(USART_CLK, ENABLE);
GPIO_InitStruct.GPIO_Pin = USART_TX_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(USART_TX_GPIOx, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = USART_RX_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(USART_RX_GPIOx, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = USART_BAUDRATE;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USARTx, &USART_InitStruct);
NVIC_Config();
USART_ITConfig(USARTx, USART_IT_RXNE, ENABLE);
USART_Cmd(USARTx, ENABLE);
}
void USART_Send_Byte(USART_TypeDef* pUSARTx, uint8_t data){
USART_SendData(pUSARTx, data);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
}
void USART_Send_Str( USART_TypeDef * pUSARTx, char *str){
uint32_t k = 0;
while ( *(str+k) != '\0' ){
USART_Send_Byte(pUSARTx, *(str+(k++)) );
}
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET);
}
|
中断服务函数
1
2
3
4
5
6
7
| void USART_IRQHandler(void){
uint8_t data;
if (USART_GetFlagStatus(USARTx, USART_IT_RXNE) != RESET){
data = USART_ReceiveData(USARTx);
USART_SendData(USARTx, data);
}
}
|
主函数
1
2
3
4
5
| int main(void){
USART_Config();
USART_Send_Str(USARTx, "Hello World");
while(1);
}
|
Note: 有BUG,无法接收数据,原因尚不清楚,只知道中断服务函数并未调用。 主函数最后加上while(1);即可,不加的话,貌似会进入HARDFAULT,导致中断服务函数无法执行。
USART 通信控制LED (标准库)
头部记得包含#include <stdio.h>。这一部分为上一部分略作修改。
关闭USART_Config()中的中断相关部分
重写fputc/fgetc
1
2
3
4
5
6
7
8
9
10
| int fputc(int ch, FILE *f){
USART_SendData(USARTx, (uint8_t)ch);
while( USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET );
return ch;
}
int fgetc(FILE *f){
while(USART_GetFlagStatus(USARTx, USART_FLAG_RXNE) == RESET);
return (int32_t) USART_ReceiveData(USARTx);
}
|
主函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
| int main(void){
char show;
LED_init();
USART_Config();
printf("Hello world\n");
while(1){
show = getchar();
printf("#: %c\n", show);
switch (show){
case 'r':
LED_TURN_ON(0);
break;
case 'g':
LED_TURN_ON(1);
break;
case 'b':
LED_TURN_ON(2);
break;
default:
printf("undefined.\n");
}
}
}
|
DMA+USART发送数据
DMA控制器独立于内核,属于一个单独的外设,主要是用来搬数据,且不占用CPU。不同的DMA控制器的通道对应着不同的外设请求, 应当根据DMA请求映像表选择通道。当发生多个DMA通道请求时,由仲裁器管理响应处理的顺序。
宏部分
1
2
3
4
|
#define USART_TX_DMA_CHAN DMA1_Channel4
#define USART_DR_ADDR (u32) &USART1->DR
#define BUFFER_SIZE 1024
|
核心函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| uint32_t send_buff[BUFFER_SIZE];
void USARTx_DMA_Config(void){
DMA_InitTypeDef DMA_InitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
DMA_InitStruct.DMA_PeripheralBaseAddr = USART_DR_ADDR;
DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)send_buff;
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStruct.DMA_BufferSize = BUFFER_SIZE;
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStruct.DMA_PeripheralDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStruct.DMA_Mode = DMA_Mode_Normal;
DMA_InitStruct.DMA_Priority = DMA_Priority_High;
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable;
DMA_Init(USART_TX_DMA_CHAN, &DMA_InitStruct);
DMA_Cmd(USART_TX_DMA_CHAN, ENABLE);
}
|
主函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
| int main(void){
uint32_t i;
LED_init();
USART_Config();
USARTx_DMA_Config();
for(i = 0; i < BUFFER_SIZE; i++){
send_buff[i] = 'a';
}
USART_DMACmd(USARTx, USART_DMAReq_Tx, ENABLE);
LED_TURN_ON(0);
Delay_ms(500);
LED_TURN_ON(1);
Delay_ms(500);
for(i = 0; i < BUFFER_SIZE; i++){
send_buff[i] = 'b';
}
USART_DMACmd(USARTx, USART_DMAReq_Tx, DISABLE);
DMA_DeInit(USART_TX_DMA_CHAN);
USARTx_DMA_Config();
USART_DMACmd(USARTx, USART_DMAReq_Tx, ENABLE);
LED_TURN_ON(0);
Delay_ms(500);
LED_TURN_ON(1);
Delay_ms(500);
}
|
其他
最初用keil5的时候就出了一堆问题,然后换keil4用了一段时间。感觉keil4的代码补全有点问题,于是我想到要用vscode配合Keil-Assistant插件来敲代码,可惜Keil-Assistant只支持Keil μVison 5及以上版本,我用新的Keil5可以正常编译,但是死活无法烧录,烧录时IDE只会输出Error: Flash Download failed - "Cortext-M3"。根据百度的结果,以及问了好几位大哥,都无法解决问题,最后我换了MDK520版本。
关于MDK与C51共存
参考链接:
MDK和各种pack软件包镜像下载
Keil历史版本的几种下载方法