机创大赛
最近在机创大赛中注入了很多心血,记录一下。5月份在同学介绍下加入了一支队伍,负责电控、视觉、前后端开发等,最终止步国二。
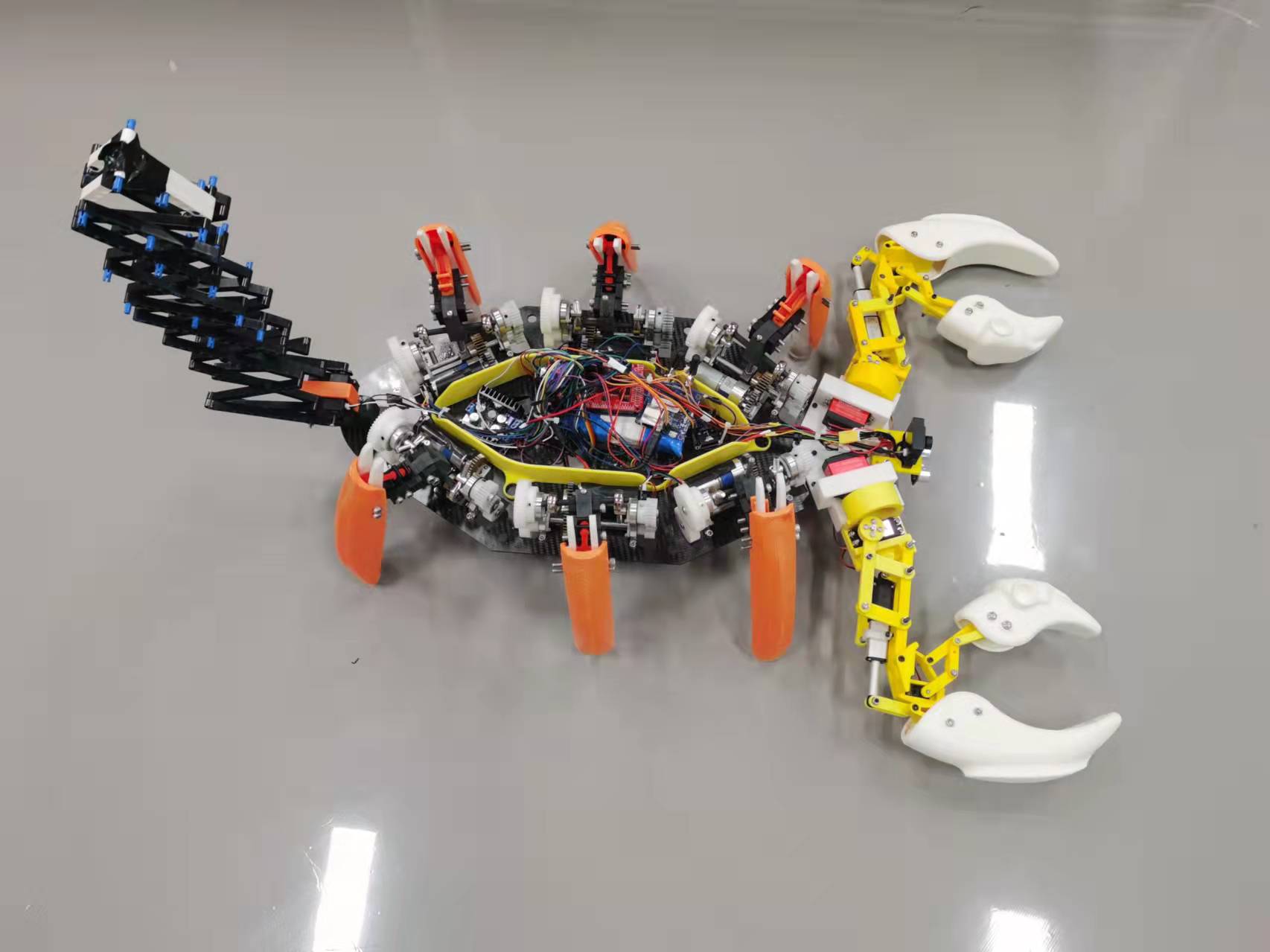
作品是仿生蝎,其中的所有机械结构和硬件都是大佬们设计制造的,结构巧妙简约,腿部仅仅只需要6个普通的直流电机即可驱动,直觉上对于控制的要求很低。但是缺点也比较明显,六条腿的运动曲线都是固定的,无法主动抬腿。在户外测试,行走在草地和公路上都非常困难,在比较光滑的路面尚且可以。
(后续补充:…比赛结束跟大家讨论,感觉做四足六足之类的机器人不太讨好,类似的作品很多,开源代码也很多很多,跟我们同赛区比赛的大佬也很多….)
我加入时,仅仅有20天时间就要进行省赛。这20天里,我几乎是从零开始学习电控,走了不少弯路,熬了不少夜,de过各种奇幻的bug…非常感谢每一位队员的陪伴和帮助,让我挺过了这魔鬼的20天。最累的时候熬到凌晨4点,第二天还要上课,现在是想都不敢想哈。最终做出来的效果就是通过移动端/PC端控制蝎子移动,做出手部动作,利用视觉寻找瓶子,夹取瓶子并用尾巴蜇,以及手势识别控制蝎子。[ 实际效果很捞(´; ω ;`) ]
电控部分虽然简单,但是实现起来依旧困难重重,原因主要是探索的道路坎坷,以及各种意想不到的硬性bug拖慢了脚步。
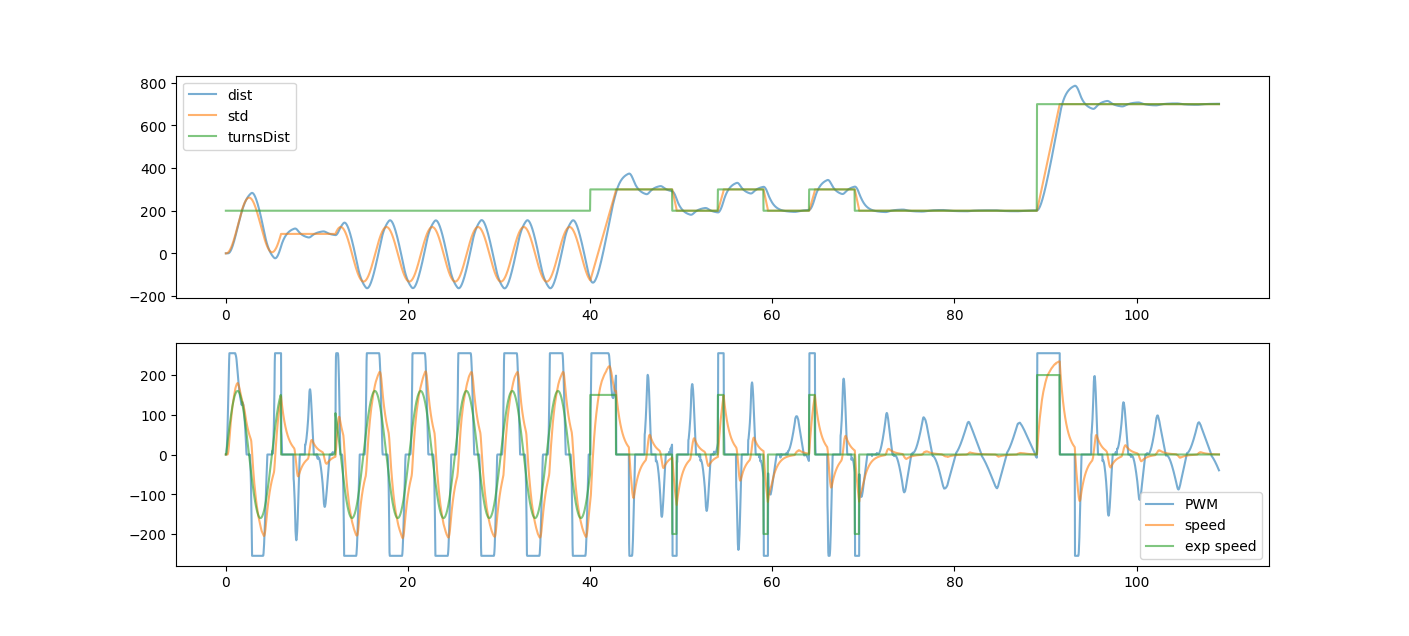
控制方式是通过仿真测试得出的,即针对速度偏差和位移偏差用两个增量式PID控制,效果几乎就是最好的,曲线大致如下图(并非最优参数),在实际运行中也是如此。
其他意想不到的bug主要就是零件松动。当时蝎子底部的螺丝松动与地面相互摩擦,导致无法行走,排查了好几天才发现…
齿轮也是老掉,每次连续运行几分钟,就会爆装备。
学校安排了好几次现场作品展示,结果我们展示的都是修蝎子 就连市长来也是表演修蝎子2333。不过最终版没那么容易出问题了。
有一点要吐槽的就是,省赛答辩那一天真是倒霉到家了。答辩前上位机代码突然出bug,无法打开PC端,然后蝎子摄像头也短暂罢工了一会儿,莫名其妙好了。然后答辩中途需要演示实物,演示需要用手机拍摄,拍摄默认用前置摄像头,需要手动切换,这时候手机突然出恶性bug,手一触屏就熄屏,导致无法打开后置摄像头,尝试着挣扎了两分钟,终于趁手机不注意点到了切换摄像头,才开始实物演示。完了后评委要求查看装配图,结果腾讯会议默认屏幕共享只共享文件夹,被评委说连文件都不会打开,又耗了两分钟时间……最后几秒钟评委才看到装配图,然后答辩超时结束了。好在最后还是拿了省一。以上文字无艺术加工,真实发生,从那一刻开始,我们都觉得必须要找个佛拜一拜 (´;ω;`)
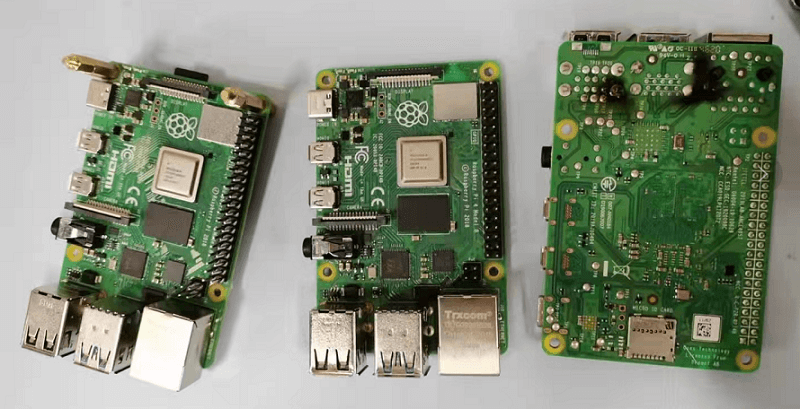
哦对了,我们还烧了3块树莓派4b(败家)…烧到最后不敢用了( ;´д`) 给换成个wifi模块。
6月份省赛时已经是省一了,晋升国赛了。国赛评审要先线上筛选出国二国三,剩下的才有资格进入线下评比(筛选国一)。然鹅,线上筛选速度奇慢,到7月27日我们才得知寄了,止步国二,此时距离线下国赛仅仅十余天,可是我们已经当牛做马搞了半个月优化代码,优化硬件,相当于我们白工作了半个月,很是遗憾。
挂几张图,不要在意接线



假期?
假期是什么?不存在的。搞完机创,还有别的智能制造大赛 (´ε`;) 早知道不报了
博客
鄙人抄的hufman模板是越看越丑,就连原版的hueman也感觉看不惯了,于是短暂地换回了官方的模板。另外typecho终于更新了,有生之年哈哈。直观感受是后台移动端更好一点,但是不太习惯导航在最底下,好怕打字打着打着突然按到导航里面的东东。此外,编辑评论处的适配似乎并没有做好,输入框快要挤到看不见了。另外新加了个预览文章,也不错。